TIPOS DE SOCKETS EN LA ACTUALIDAD
Tipos de sockets:
Según el modo de ajuste que presentan se presentan como sockets con suspensión asistida y sockets de auto suspensión.
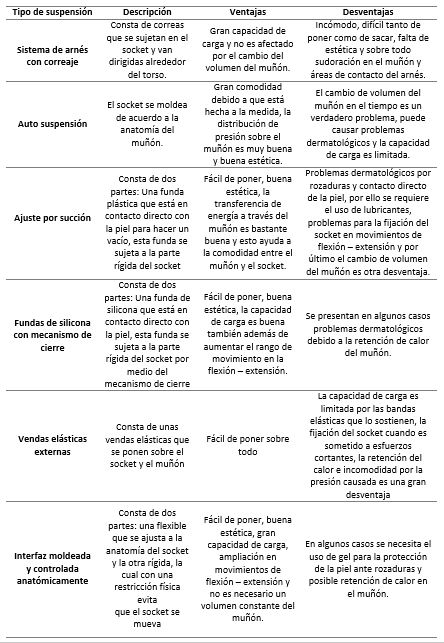
Figura: Tipos de sockets según el ajuste. Fuente: DÍAZ LAVANA, I. (2008). DISEÑO Y CONSTRUCCIÓN DE UN SOCKET DE MIEMBRO SUPERIOR CON SUSPENSIÓN AJUSTABLE.
El tipo de socket que se elija depende de la funcionalidad que se requiera, es decir depende de la actividad acostumbrada del paciente para garantizar que el socket sea cómodo y funcional tenemos que hablar de un concepto importante: Medio de suspensión de la prótesis de los cuales hablaremos a continuación.
Las suspensiones se pueden clasificar de la siguiente manera:
Sistema de arnés con correaje para sujetar la prótesis al cuerpo.
-
Moldeado del encaje alrededor de la anatomía ósea restante (muñón), sockets de auto suspensión.
-
Ajuste por succión.
-
Fundas de silicona con mecanismos de cierre.
-
Vendas elásticas externas.
La suspensión más usada son las de fundas de silicona con cierre dado que tienen buen acoplamiento ante las necesidades, resolviendo incomodidades que normalmente se dan, las fundas proporcionan una excelente suspensión.

Tabla: Tipos de suspensión para sockets
Fuente: DÍAZ LAVANA, I. (2008). DISEÑO Y CONSTRUCCIÓN DE UN SOCKET DE MIEMBRO SUPERIOR CON SUSPENSIÓN AJUSTABLE.
La clasificación de sockets de miembros superiores se muestra en la siguiente figura

FUENTE: Abd Razak, N., Abu Osman, N., Gholizadeh, H., & Ali, S. (2018). Retrieved from https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4120006/pdf/1475-925X-13-108.pdf
En nuestro caso, para amputaciones transradiales se muestran en el lado izquierdo, tenemos dos grandes grupos y dentro de estos dos grandes grupos encontramos una clasificación mucho más específica que se dio a través del tiempo. Actualmente las mejoras tienden a ser de carácter mecánico (facilidad de movimiento) sin embargo y aunque el prototipado no se ha visto muy afectado (en cuanto materiales nos referimos), haremos referencia a los materiales usados en la fabricación del socket.
Las primeras prótesis que aparecen en nuestro campo de acción son las Northwesern, Muenster y TRAC las cuales aparecen el siglo 20 donde encontramos un ajuste por contacto completo basadas en compresión de regiones adecuadas (supracondíleas) pero cuya desventaja se nota inmediatamente ya que la incomodidad térmica generaba más de una molestia, de la misma forma esta prótesis limitaba en campo de movimiento (ROM) que nos indica que el rango de movimiento que se puede hacer con dicha prótesis, en nuestro caso las limitaciones venían por parte del socket que limitaba en movimiento natural del brazo.
Para poder solucionar el problema térmico que generaban las prótesis de contacto completo se inician a fabricar los sockets de tres cuartos y WILMER los cuales fueron fabricados con aberturas, en el caso de los sockets de tres cuartos la parte proximal en el hueso estaba descubierto creando un sistema de transpirable además de poder aumentar la capacidad de movimiento ROM en la flexión, mientras que los sockets WILMER se caracteriza por una estructura abierta hecha de acero parcialmente cubierta por un material blando.
También se crea los sockets ergonómicos diseñado para maximizar la biomecánica cuya eficiencia se logra gracias a las partes abiertas y bordes rígidos en correspondencia con regiones anatómicas específicas aprovechando de mejor manera una interfaz maximizando la capacidad de movimiento.
Los sockets ACCI y TRAC son sistemas que garantizan la estabilidad de las mismas gracias a los bordes proximales en el medial lateral y en regiones ante cubitales evitando la compresión en zonas sensibles del muñón (principal dificultad de las prótesis antes mencionadas) sin embargo estás prótesis eran muy similares a los Muenster, es decir prótesis de contacto completo. Sin embargo una modificación de este diseño a partir del concepto de tres cuartos fue un avance tratando de garantizar la comodidad del paciente sin perder las propiedades ganadas como un mejor equilibrio y maximizando el movimiento natural del brazo.
El socket Hi Fi basado en tres o más puntos de compresión reduciendo el movimiento relativo entre el socket y el muñón, todos estos últimos modelos son del tipo ventilados, ya que es el principal requerimiento para una buena prótesis, sin embargo el reducimiento del muñón es un gran problema para muchos pacientes.
Sistema Hi Fi. FUENTE: Abd Razak, N., Abu Osman, N., Gholizadeh, H., & Ali, S. (2018). Retrieved from https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4120006/pdf/1475-925X-13-108.pdf
Actualmente se intenta garantizar el modelaje con mayor comodidad, potenciando el movimiento de la prótesis sin ignorar los requerimientos de adaptación, por ello la mejor opción son los sockets de vacío con un sistema de ventilación mediante tubos bajo la manga hacia la parte hueca del socket, los sockets se ajustan mediante presión por ellos se usa una cubierta de silicona principalmente por sus propiedades mecánicas y bio compatibles con la piel, el socket puede ser conformado por fibra de carbono pero que sin embargo por cuestiones económicas y de rápido diseño se prefiere una conformación plástico dado que en general contiene las suficientes propiedades mecánicas que garantiza el buen funcionamiento de la prótesis.
En el siguiente cuadro, se puede observar que el peso del antebrazo es de aproximadamente 1,87% del peso total del cuerpo, y el de la mano es de aproximadamente 0,65%. Suponiendo una amputación ideal, asumimos que la pérdida de peso es de la tercera parte del antebrazo más la mano. Por lo tanto, la pérdida total en una amputación ideal será del 1.27% del peso total del paciente.
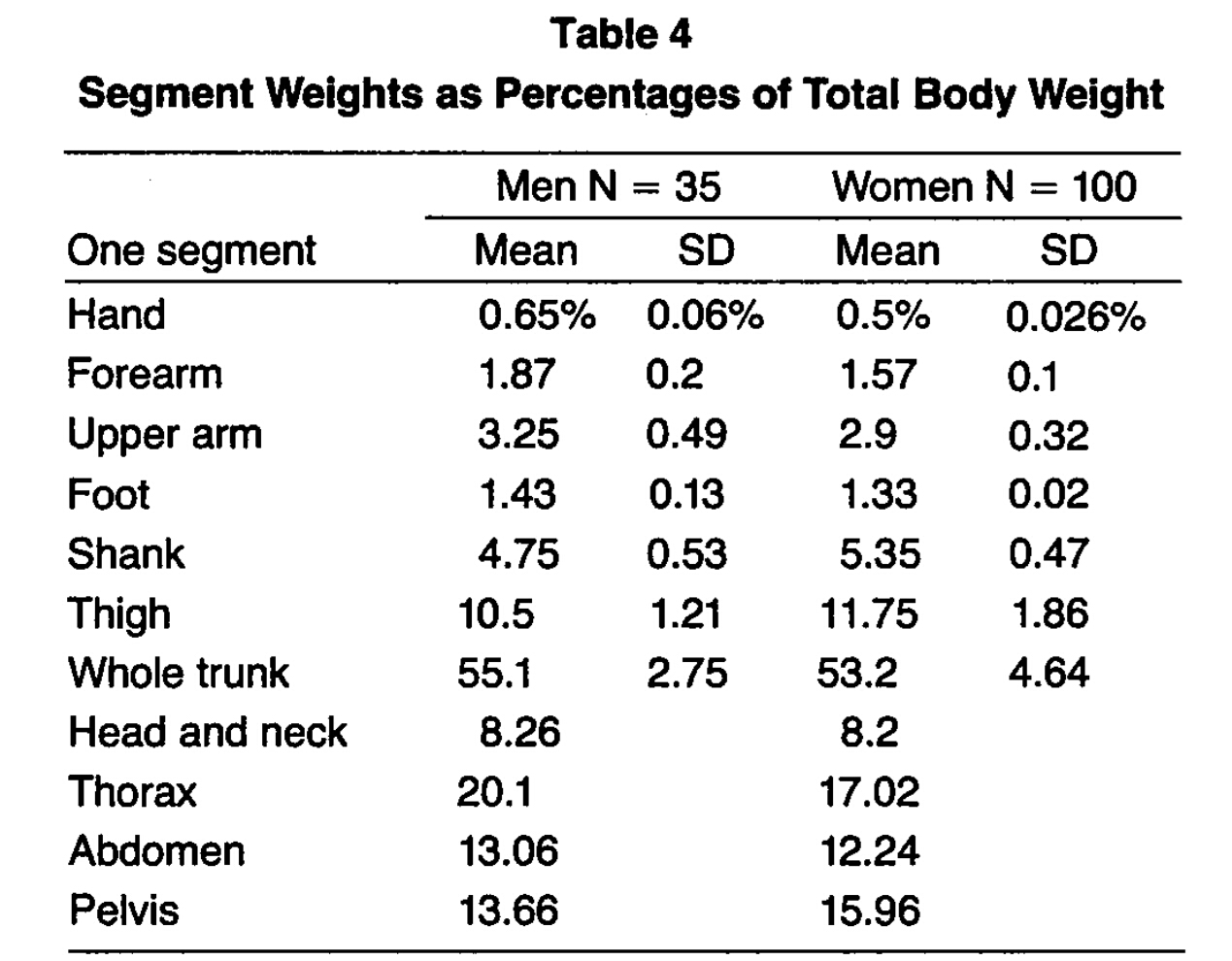
Plagenhoef, S., Evans, F. G., & Abdelnour, T. (1983). Anatomical data for analyzing human motion. Research Quarterly for Exercise and Sport 54, 169-178.
En el Perú, según el INEI, el peso promedio de una mujer es de 57 kilogramos. Esto nos indica que, teóricamente, una prótesis ideal de antebrazo para mujeres debe pesar 0,723 kilogramos.
Actualmente un estudio muestra prótesis livianas con un peso de 1 kilogramo aproximadamente, antes que el paciente note alguna diferencia, es decir con este peso el paciente se siente cómodo en cuanto a peso se refiere.
Cabe señalar que el peso extra al dato encontrado se debe a la parte electrónica que se le añade a la prótesis.